DJI Mavic 2 Pro 3D Model and Rig
This project started out as a modeling practice, but it quickly evolved into alot more than that. Infact i probably spent longer rigging the drone, than modeling it. Quite happy how it turned out tho! You can watch the rig demo video bellow. But in a nutshell, the drone automatically leans in the direction of movement, based on the velocity and independently of its orientation. It was quite the brain excercise figuring out the math! It can also lock its orientation on a selected heading vector, and keep the camera locked onto another target at the same time! Animating it is so much fun, i will definitely be playing more with it in the future.
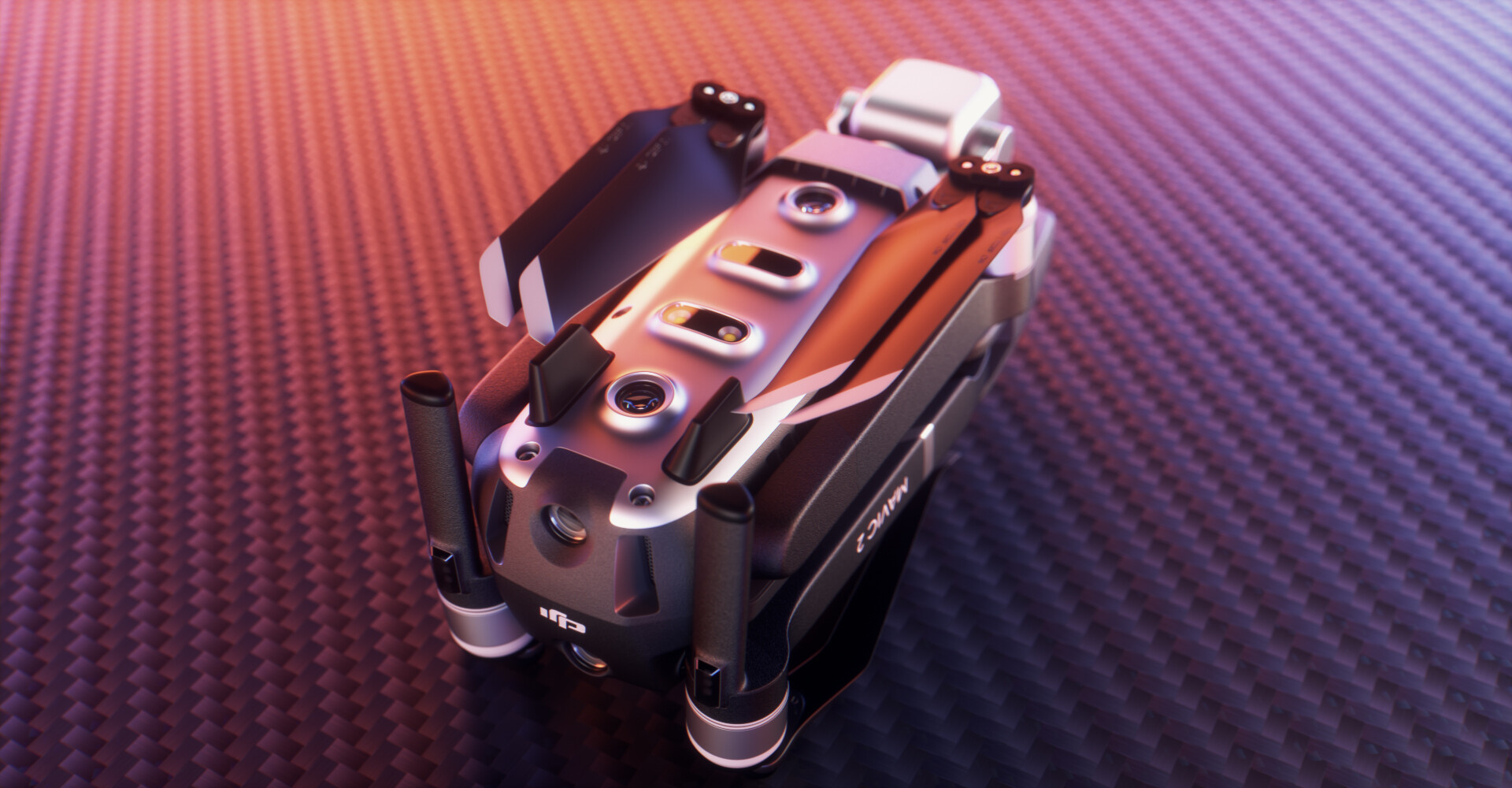
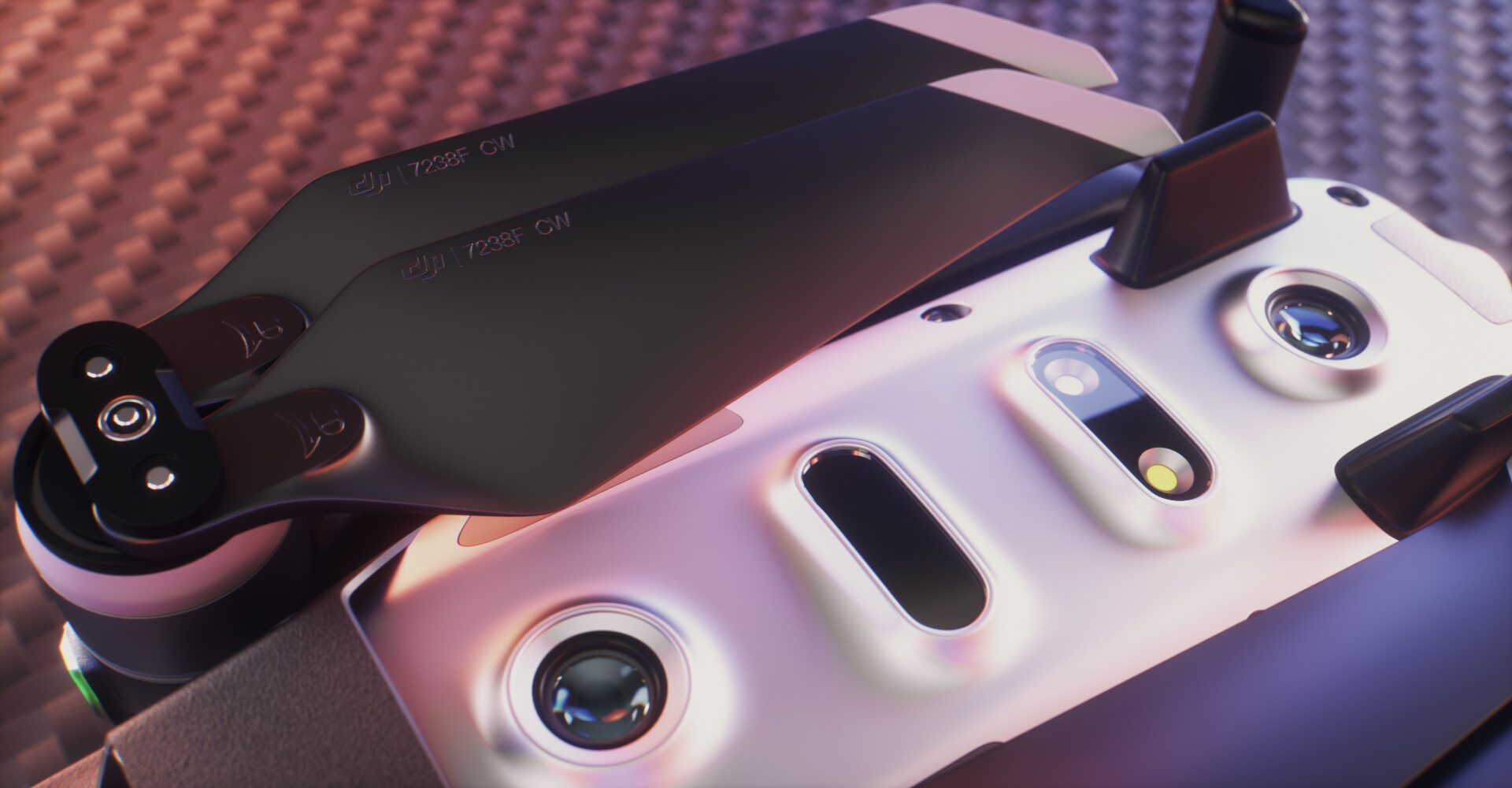
And as usual, tons of renders to showcase the actual model.
Demo video of the drone rig in Cinema 4D.